宇树科技发布全新开源世界模型动作架构UnifoLM-WMA-0重磅登场
宇树科技发布了开源世界模型动作架构UnifoLM-WMA-0,该架构是一个全新的动作生成与控制框架,旨在提供一个统一的平台来处理各种复杂的机器人动作任务,通过开源的方式,该架构将促进机器人技术的研究和发展,同时让开发者更容易构建先进的机器人应用,这一创新性的技术发布对于机器人行业来说具有重大意义,有望推动机器人技术的进一步发展和应用。
宇树科技近日发布了面向多种机器人本体的开源世界模型-动作(wma)架构——unifolm-wma-0。该架构致力于为通用机器人学习构建统一的技术底座,其核心是一个能够理解机器人与环境之间物理交互规律的世界模型。

这一世界模型具备两大关键能力:
- 仿真引擎:可作为交互式仿真工具,用于生成机器人学习所需的合成数据。
- 策略增强:能与动作头模块无缝对接,通过预测未来与物理环境的交互过程,提升决策质量。
模型可接收视觉图像和自然语言指令,并据此生成符合语义描述的未来动作视频序列。
据官方说明,UnifoLM-WMA-0 支持两种工作模式:
- 决策模式:输出机器人与环境物理交互的预测结果,辅助策略网络生成更优动作。
- 仿真模式:根据给定的机器人动作,生成高保真的环境响应反馈。
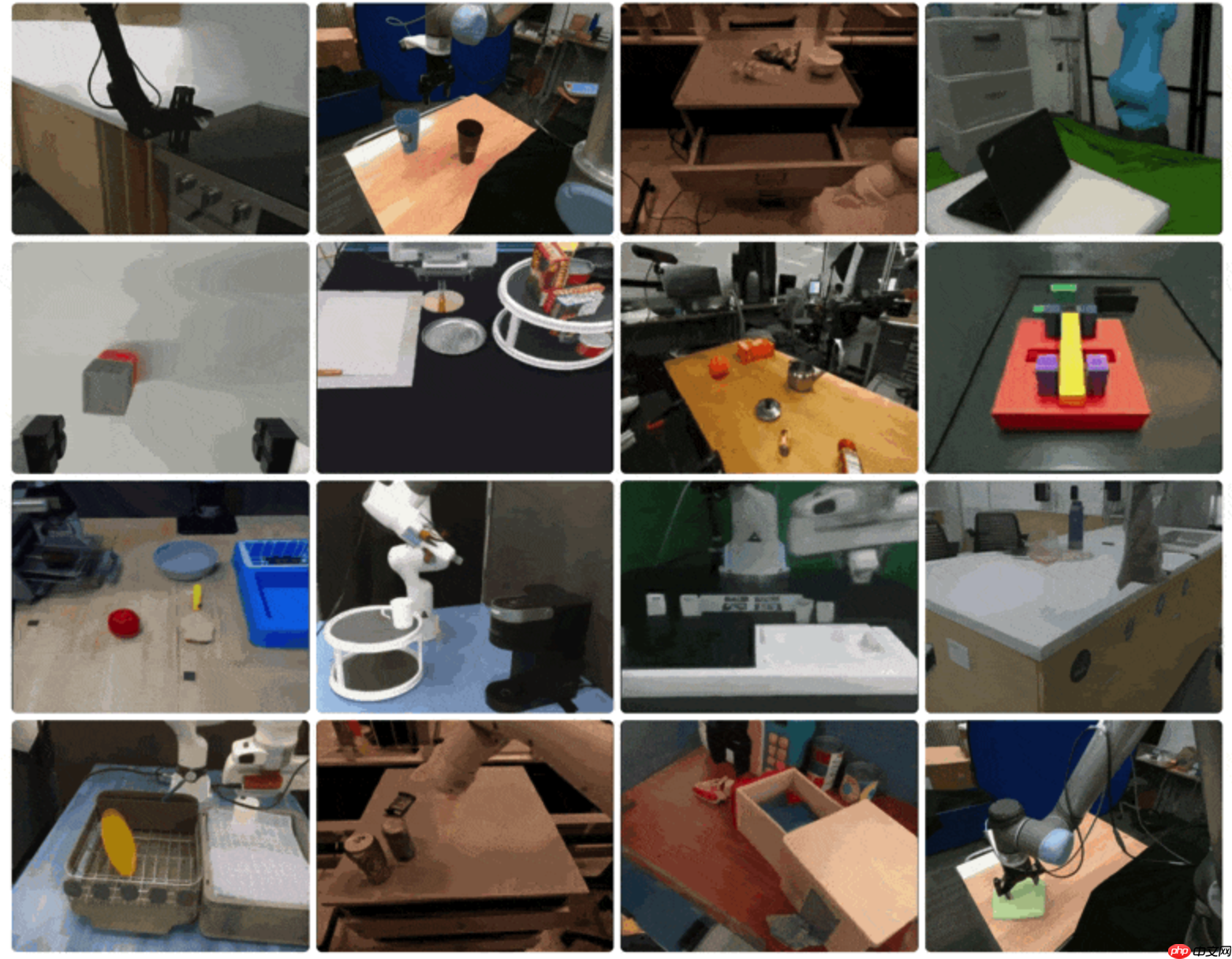
在训练过程中,研发团队利用宇树科技公开发布的5个开源数据集对模型进行训练。测试表明,该模型能够基于“当前画面”以及预设的“未来机器人动作”,实现可控的交互内容生成,并展现出在长周期任务中持续生成合理交互行为的能力。
项目主页:https://www.php.cn/link/a7a1b53e91a3344e9eb9db2a6fa4eae2
开源代码地址:https://www.php.cn/link/5cd338743288fdb62b74ee279d51bf93
<< 上一篇
下一篇 >>
网友留言(0 条)